
Yueci Deng (邓岳慈)
Ph.D. Student, School of Data Science, CUHK-SZ
I am a first-year CS Ph.D. student at the Chinese University of Hong Kong, Shenzhen (CUHK-SZ), supervised by Prof Kui Jia. I received my B.S. from UESTC (2014-2018) and M.S. from NTU, Singapore (2018-2019). Before joining CUHK-SZ, I worked as an architect at DexForce Technology, where I led the development of DexVerseTM, a Sim2Real AI Platform for Embodied Intelligence.
My research focuses on building high-performance, automated, and scalable simulation, data-generation, and AI training systems for embodied intelligence. My long-term goal is to develop neural world models and simulation engines that enable embodied agents to autonomously learn, evolve, transfer to the real world, and continually improve during deployment.
My research interests are mainly in the following areas:
- Systems:
- High-performance, Heterogeneous and GPU-accelerated Simulation Engine Architecture
- Data Generation and Model Training Systems for Embodied Intelligence
- Simulation:
- Generative Simulation
- Neural Representation for Simulation
- Differentiable Simulation for Analytic Policy Gradients
- Embodied Intelligence:
- Neural Motion Generation for Robot Control
- Physics-Structured Model Architecture
- Sim2Real Transfer and Domain Adaptation
- Online and Continual Learning for Embodied Agents
Collaborations & Opportunities
I welcome research or open source project collaborations on Embodied Intelligence and Simulation Infrastructure. If you’re interested in joint projects, code sharing, student internships, or industry partnerships, please contact me at yuecideng@link.cuhk.edu.cn.
Projects
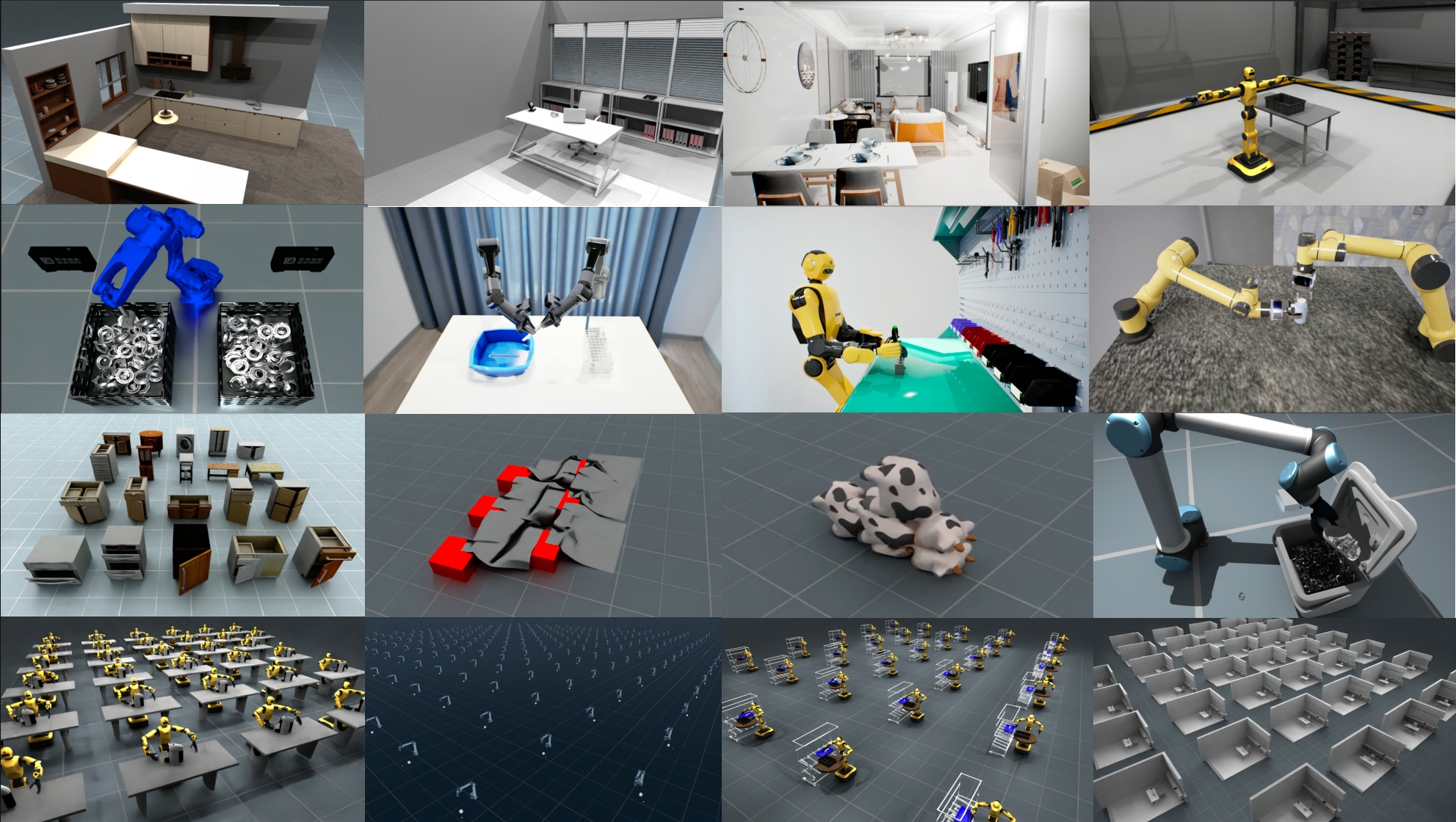
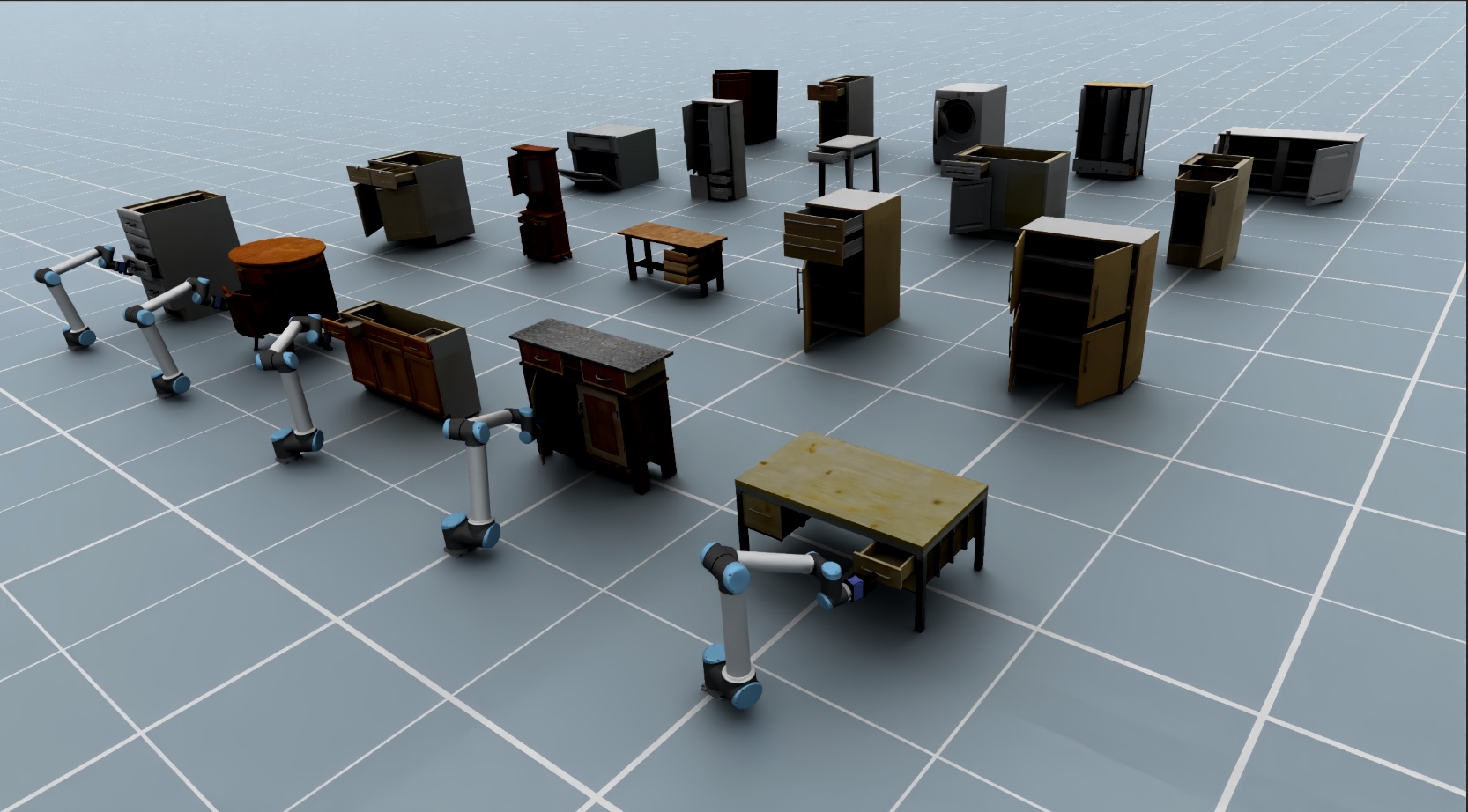
EmbodiChain: An end-to-end, GPU-accelerated, and modular platform for building generalized Embodied Intelligence
EmbodiChain is a unified, GPU-accelerated framework designed for pushing the boundaries of embodied AI research and development. It integrates high-performance simulation, data collection via automated generative simulation techniques, data scaling pipeline, modular model architectures, and efficient training & evaluation tools. All of these components work seamlessly together to facilitate rapid experimentation and deployment of embodied intelligence and perform Sim2Real transfer into real-world robotic systems.

Open3D: A Modern Library for 3D Data Processing
The leading open-source library for 3D processing with 400K+ monthly downloads from PyPI. Open3D exposes a set of carefully selected data structures and algorithms in both C++ and Python for 3D data processing tasks including point cloud processing, mesh processing, and 3D visualization.
Publications
PAct: Part-Decomposed Single-View Articulated Object Generation
PAct generates complete, part-decomposed articulated 3D objects from a single-view image, synthesizing high-fidelity geometry and appearance while estimating kinematic structures for direct use in physics-based simulation.
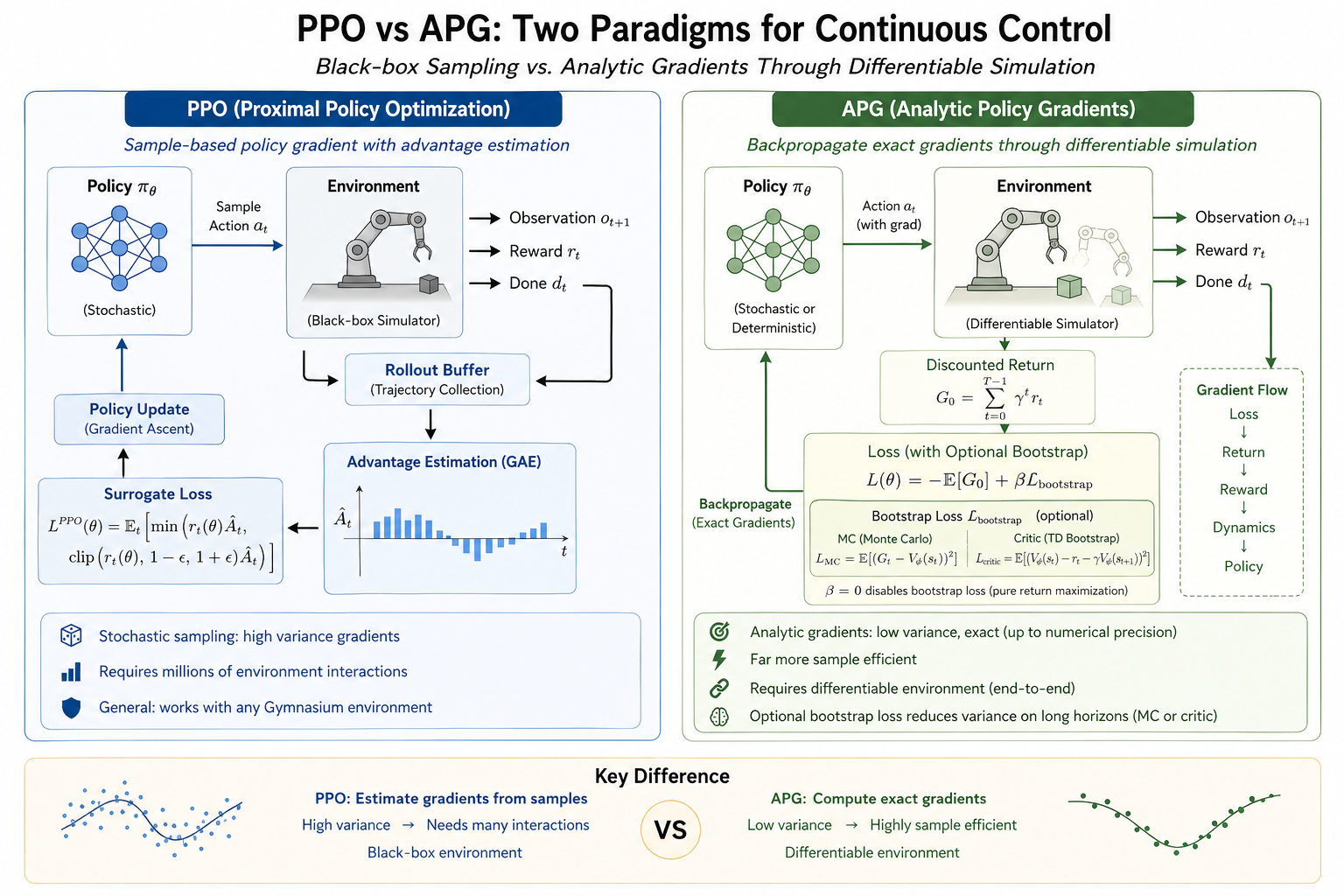
Backpropagating Through Simulation: Analytic Policy Gradients for Sample and Learning Efficient Differentiable Continuous Control
A differentiable-control benchmark and training framework that compares Analytic Policy Gradients with PPO across continuous control tasks, using backpropagation through simulation to study sample-efficient policy optimization.
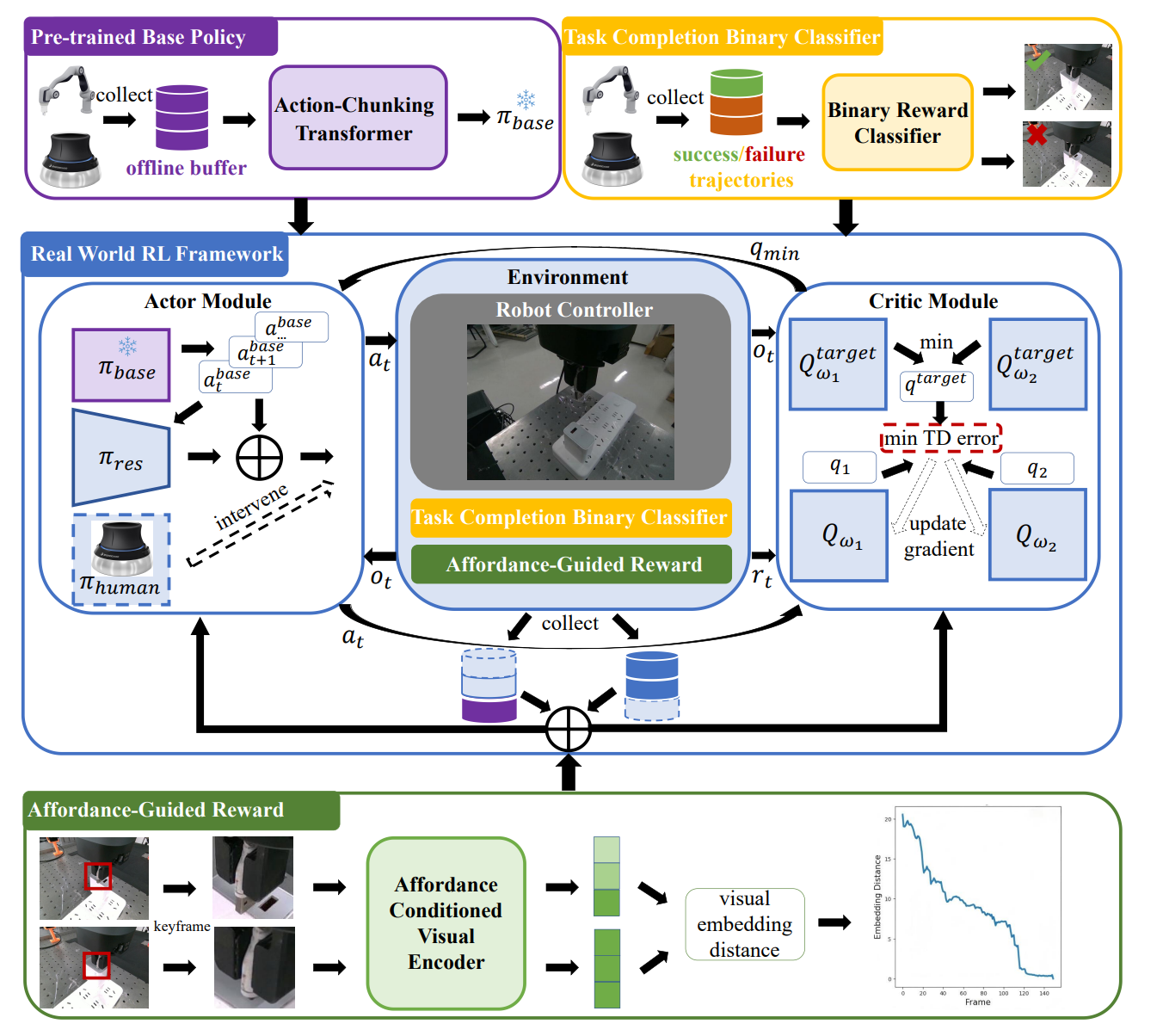
Focus-Then-Contact: Speeding Up Robotic Contact-Rich Task Learning with Affordance-Guided Real-World Residual Reinforcement Learning
A lightweight real-world RL method that uses residual RL and affordance-guided rewards to speed up contact-rich robot manipulation learning with minimal human-in-the-loop effort.
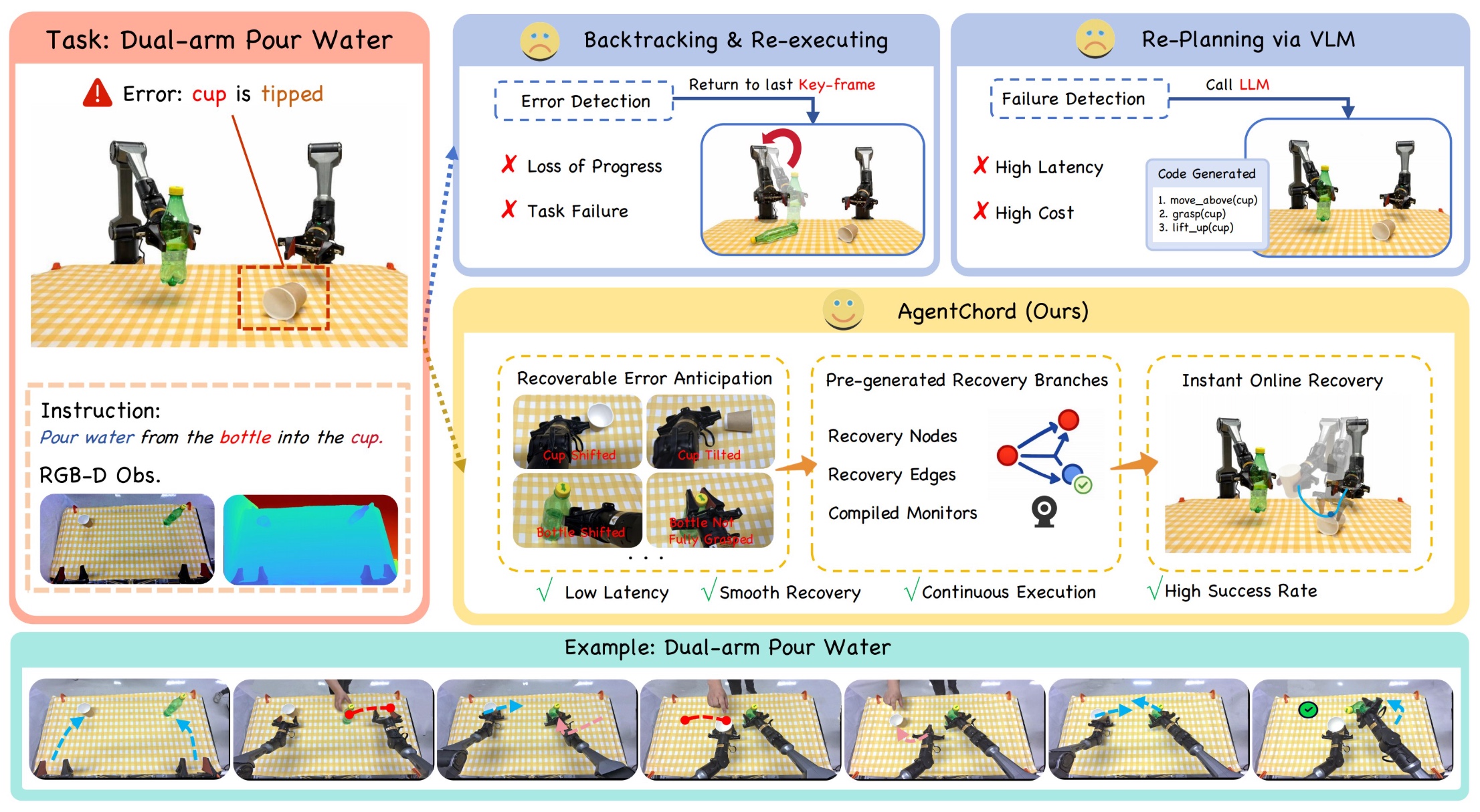
From Reaction to Anticipation: Proactive Failure Recovery through Agentic Task Graph for Robotic Manipulation
A recovery-aware task-graph system that helps real robots anticipate disturbances, switch to prepared recovery branches, and keep long-horizon manipulation moving.
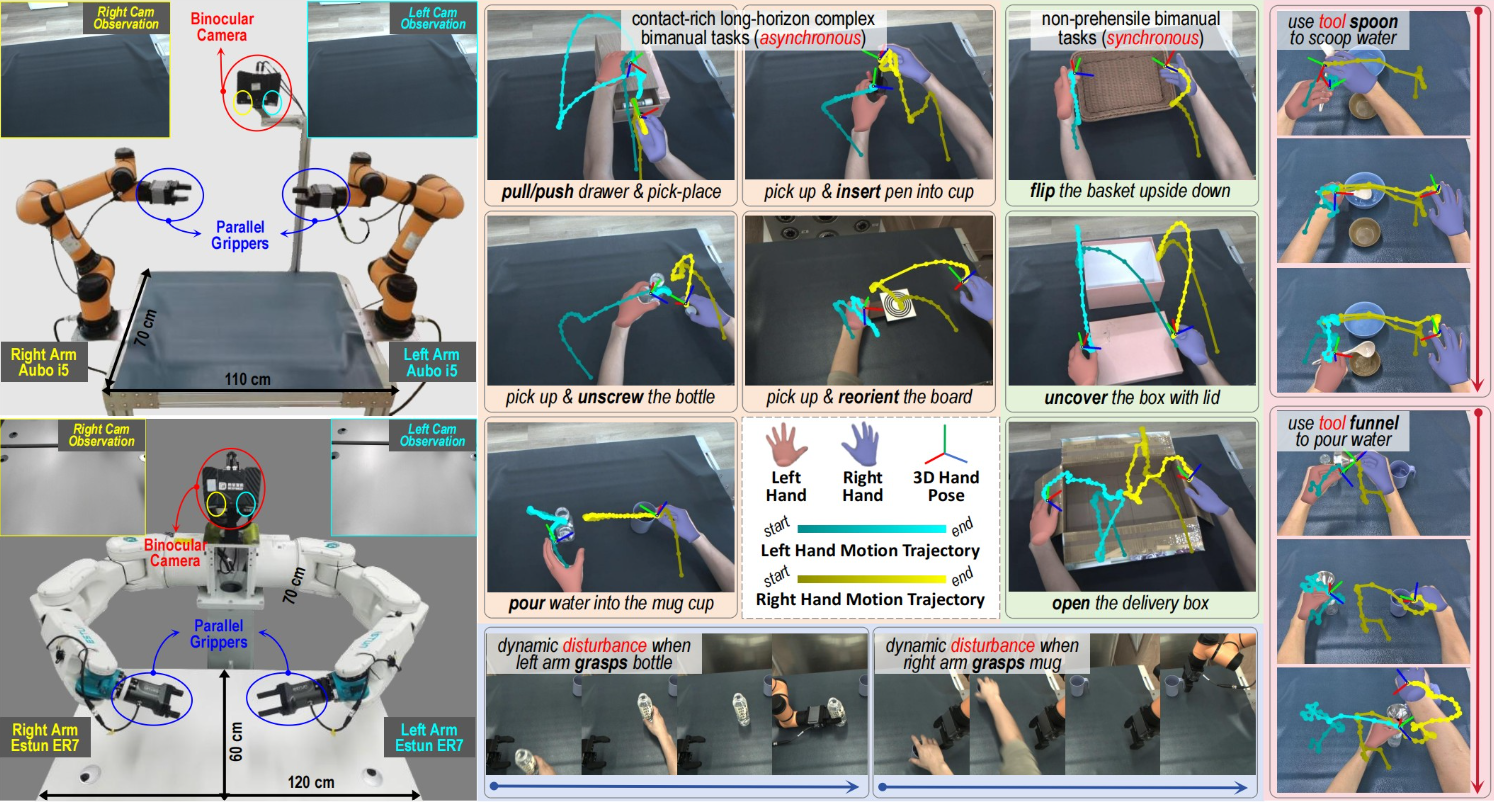
YOTO++: Learning Long-Horizon Closed-Loop Bimanual Manipulation from One-Shot Human Video Demonstrations
YOTO++ (extended from the conference version You Only Teach Once) enables cross-embodiment deployment (from the contralateral to humanoid dual-arm setups), and facilitates diverse bimanual tasks including asynchronous, synchronous and tool-using scenarios, with closed-loop control under dynamic disturbances during pre-grasping.
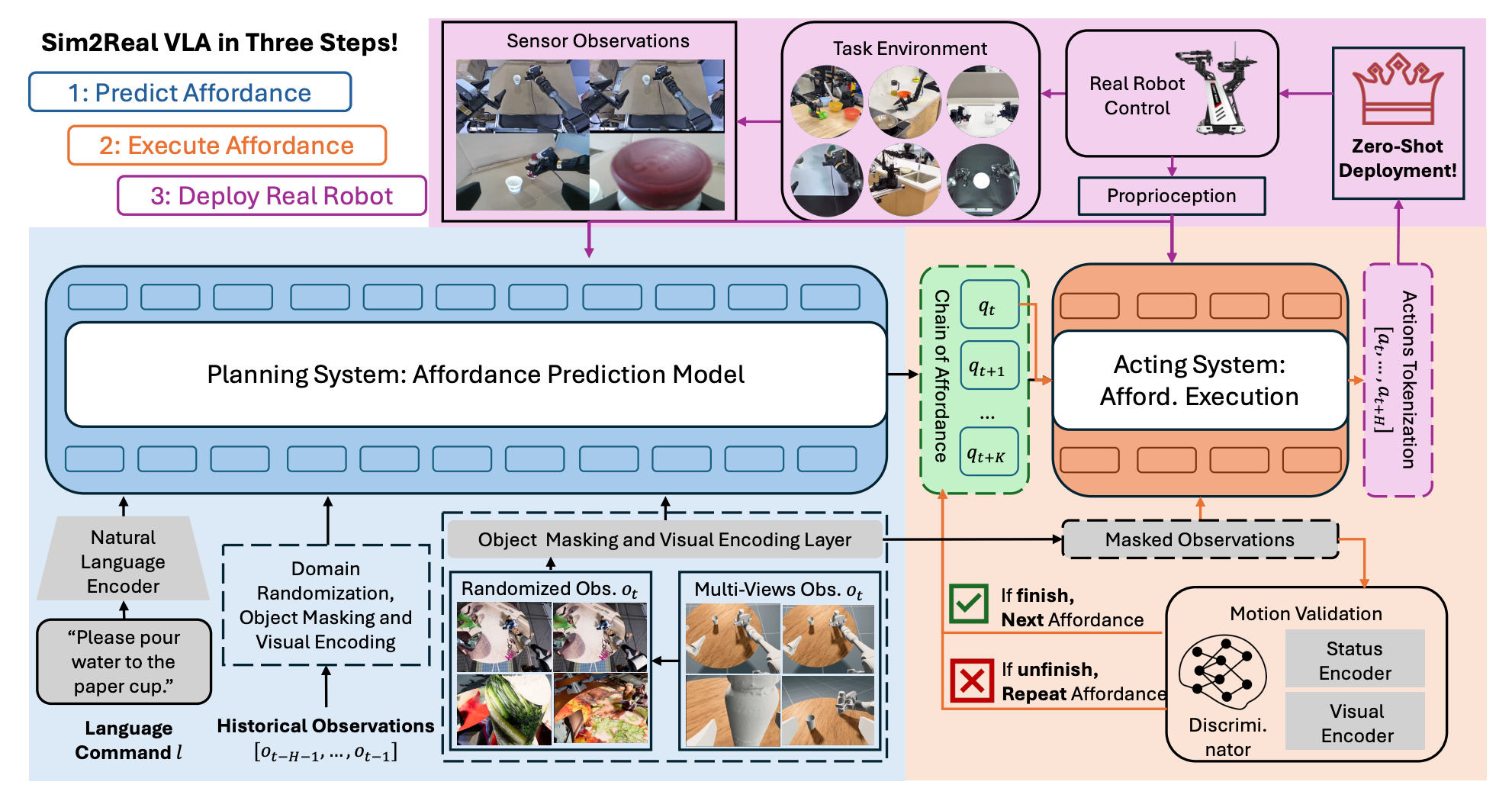
Sim2Real VLA: Zero-Shot Generalization of Synthesized Skills to Realistic Manipulation
This paper introduces Sim2Real-VLA, a generalist robotic control model that enables zero-shot transfer from synthetic simulation to real-world manipulation tasks.
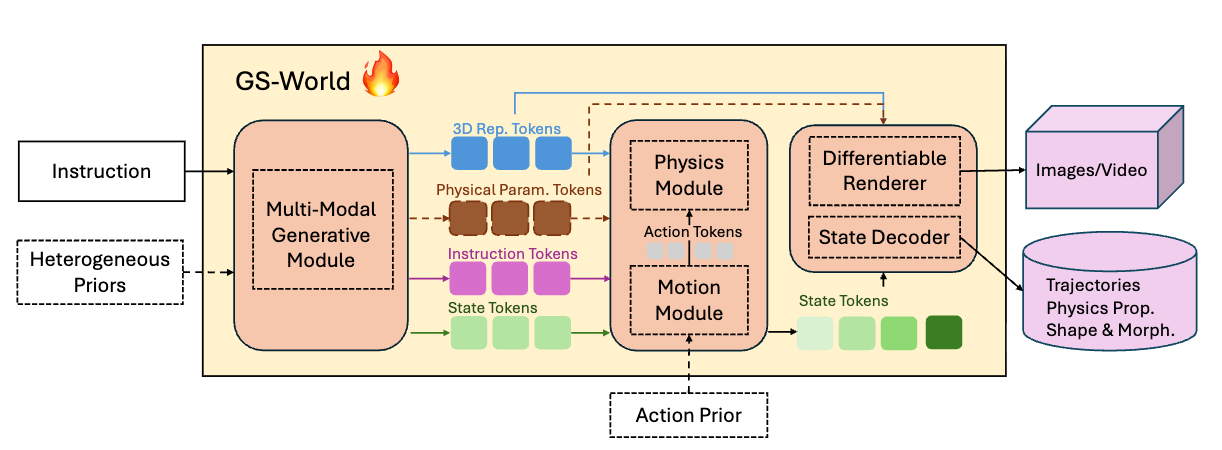
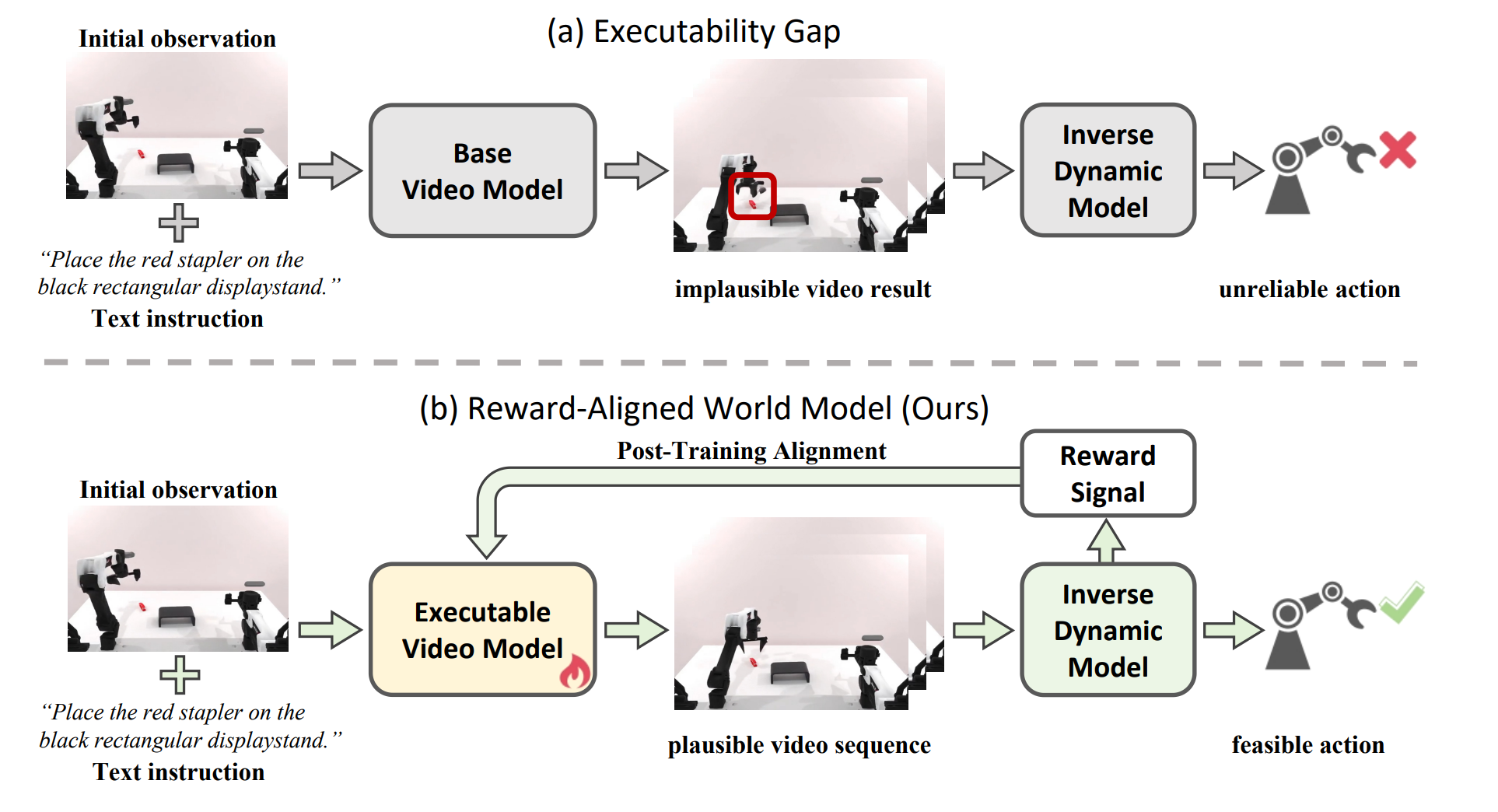
GS-World: An Engine-driven Learning Paradigm for Pursuing Embodied Intelligence using World Models of Generative Simulation
Position paper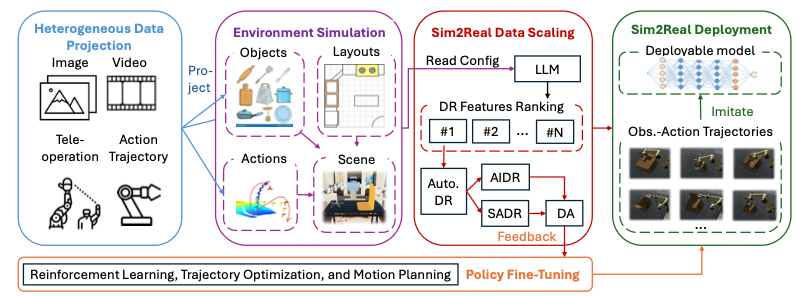
DexScale: Automating Data Scaling for Sim2Real Generalizable Robot Control
A novel data engine for automating data generation and scaling for sim-to-real transfer of robotic manipulation tasks.
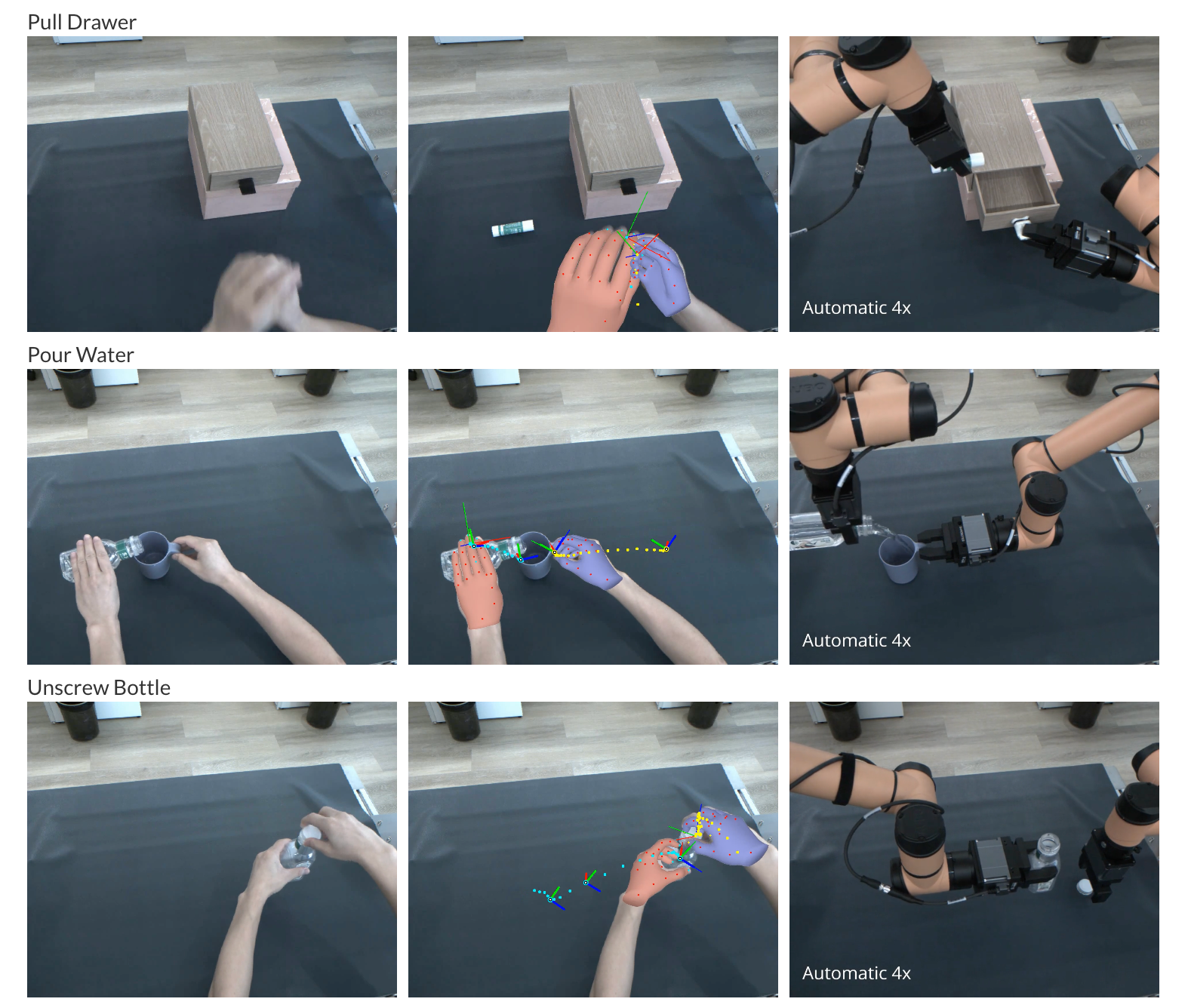
You Only Teach Once: Learn One-Shot Bimanual Robotic Manipulation from Video Demonstrations
This work proposes the YOTO (You Only Teach Once), which can extract and then inject patterns of bimanual actions from as few as a single binocular observation of hand movements, and teach dual robot arms various complex tasks.